













解决方案


905nm半导体激光雷达/测距雷达解决方案
激光雷达(LiDAR)是通过发射激光束并接收回波,精确获取目标距离、速度、三维坐标与形态的主动探测系统,核心优势是毫米级测距精度、全天候主动感知、直接输出 3D 点云。激光雷达按激光波长分类为:905nm和1550nm激光波段。

905nm特点:成本低、技术成熟、探测器易获取;人眼安全功率受限、远距离弱、易受日光干扰。
905nm是当前乘用车高级辅助驾驶(ADAS)和工业测距领域低成本、高可靠的主流选择,其核心在于利用成熟的硅基光电技术实现高性能与低成本的平衡。
一、核心器件选型
光源/激光器:主流采用905nm Edge Emitting Laser (EEL),因为它具有极高的功率密度,能实现更远的探测距离,新一代的EEL芯片在温漂系数(低至0.06nm/K)和高温功率稳定性上已大幅优化,在近场补盲或对成本极度敏感的场景,VCSEL也是常见选择。
光电探测器:通常配合硅基雪崩光电二极管(Si APD),技术成熟且增益可达100倍左右。
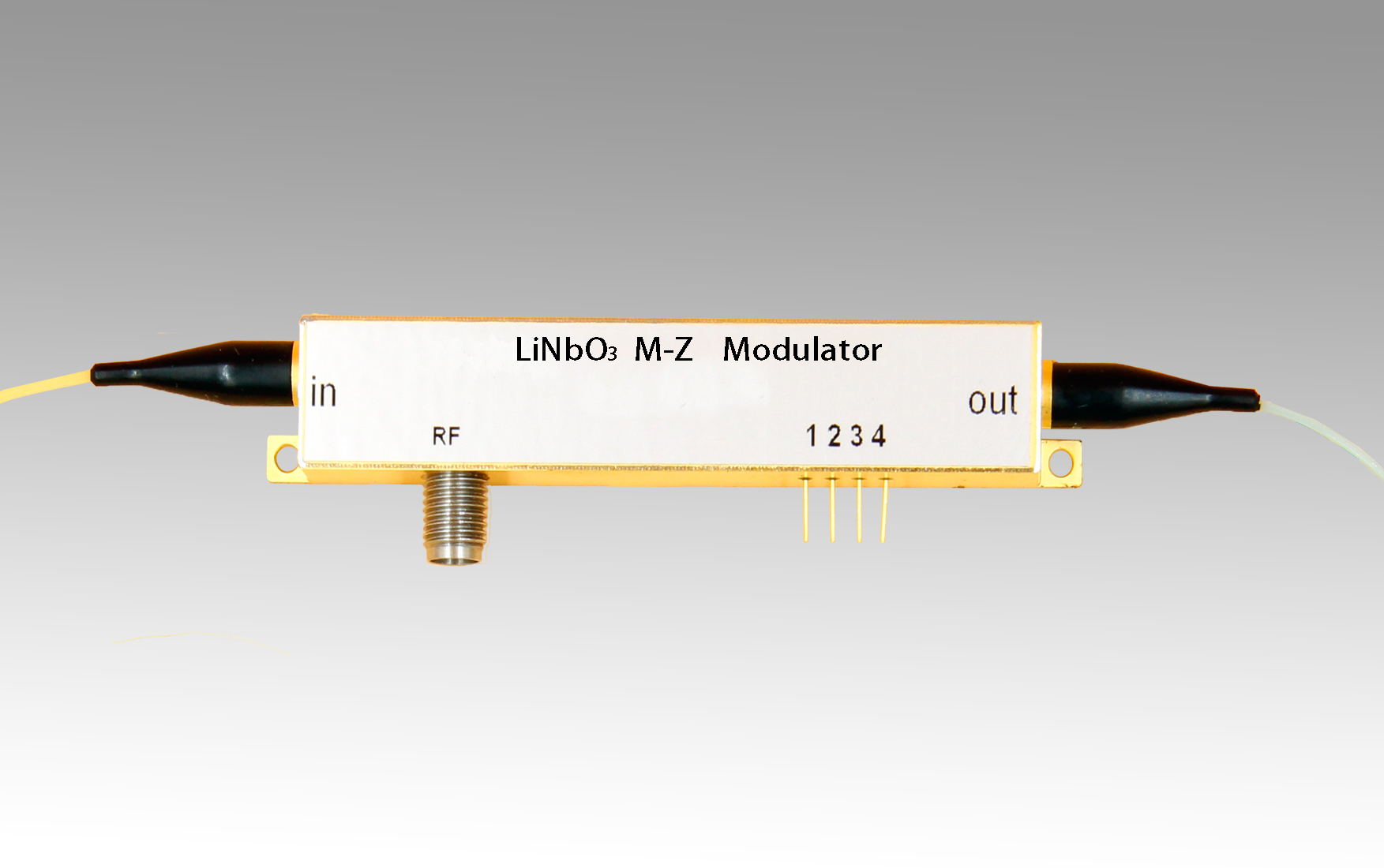
电光相位调制器:在905nm波段,相位调制主要用于调频连续波(FMCW) 技术路线。为了实现线性调频,可采用外调制器(如基于铌酸锂或硅光子的调制器)或对激光器电流进行直接频率调制。
二、解决方案原理框图(以dTOF方案为例)
以下是基于905nm的直接飞行时间(dTOF) 激光雷达的核心架构,这是当前最普遍的技术方案。
 激光雷达的核心架构原理图")
三、关键计算公式(dTOF)
1、距离基本公式

其中,R 为目标距离,c 为光速(3×108m/s),t 为激光脉冲往返时间。
2、测距精度与计时精度
其中,ΔR 为距离精度,Δt 为时间测量精度。要达到 ±1cm 的精度,系统需要约66ps 的计时精度。
3、激光峰值功率计算(链路预算):
其中,Pr 为接收光功率,Pt 为发射峰值功率,ρ 为目标反射率,Ar 为接收孔径面积,ηsys 为系统光学效率。此公式用于确保回波信号高于探测器的灵敏度。
四、典型应用案例
- 乘用车ADAS:如标配或选装激光雷达的L2+级车型,利用1-2颗前向905nm激光雷达实现城市和高速NOA功能。
- 工业自动化:生产线上的工件位置检测、AGV导航与避障,精度可达毫米级。
- 机器人:扫地机器人、割草机器人的环境建图与导航。
产品推荐






